
The following white papers each illustrate a practical and sophisticated application of RecurDyn. Click on the “Learn more…” links below to download each white paper.
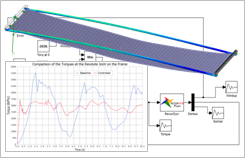
Active Control of Solar Array Dynamics During Spacecraft Maneuvers
Recent NASA mission plans require spacecraft to undergo potentially significant maneuvers (or dynamic loading events) with large solar arrays deployed. Therefore there is an increased need to understand and possibly control the nonlinear dynamics in the spacecraft system during such maneuvers. The development of a nonlinear controller is described. The utility of using a nonlinear controller to reduce forces and motion in a solar array wing during a loading event is demonstrated. The result is dramatic reductions in system forces and motion during a 10 second loading event. A motion curve derived from the simulation with the closed loop controller is used to obtain similar benefits with a simpler motion control approach.
Learn More...
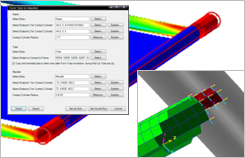
Simulation of the Deployment of a Flexible Roll-Up Solar Array Using Multi-Body Dynamics Software
Future missions to the outer planets will require significant power that may be provided by large, 300 kW class, flexible roll-up solar arrays. To support the development of these arrays there is high value in simulating the nonlinear dynamics of stowing, deploying, and performance of large deployable solar array structures, especially with the profound limitations of physical testing. Physical testing of prototypes on earth with gravity can be difficult or impossible. Multi-body dynamics software is an ideal platform for developing simulations modeling deployment of flexible, spacecraft structures. This paper presents a dynamic simulation of the deployment of a roll-up solar array using multi-body dynamics modeling software. Additionally, the paper presents the development of a set of software tools that automate tedious tasks associated with developing models of these structures. The tools will aid in the development of future simulation of structures using roll-up boom technology.
Learn More...
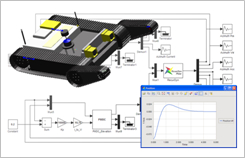
Simulating Computer-Controlled Multibody Dynamic Systems
Today’s increasingly sophisticated products often consist of a mechanical system controlled by a microprocessor-based control system. But creating virtual prototypes of these products using traditional simulation approaches is difficult for various reasons. Typically, a mechanical engineer can develop a good mechanical model using Multibody Dynamics (MBD) simulation software, but including an over-simplified control scheme in the model yields useless results. Meanwhile, a controls engineer can design a controller using control systems modeling software, but without a realistic model of the plant (the mechanical system), the controller design will be poor.
Recently, however, new technology has been created which allows simulation of both complex nonlinear mechanical systems and their controllers together. With this new technology, the control system designers can efficiently test pre-developed control algorithms at an early design stage with highly nonlinear dynamic models. And mechanical engineers can quickly simulate their models using the developed control systems before costly prototypes are built. To simplify the workflow, both types of engineers can make changes to separate parts of the same model.
Learn More...